Giới thiệu
Radio XBee được dựa trên IEEE 802.15.4 (tiêu chuẩn kỹ thuật xác định hoạt động của mạng không dây khu vực cá nhân tốc độ thấp (LR-WPAN)) tiêu chuẩn và nó được thiết kế cho điểm đến điểm, sao vv thông tin liên lạc trong không khí.
Sau đây là các tính năng chính của thiết bị vô tuyến XBee,
- Chúng hoạt động trên tần số vô tuyến 2.5GHz (Unlicensed Radio Band).
- Tốc độ dữ liệu thấp (≈250Kbps).
- Tiêu thụ điện năng thấp (1mW, 6mW, 250mW, vv).
- Các ứng dụng truyền thông không dây (90m, 750m, 1mile vv)
Do đó chúng được sử dụng trong Home Automation, cảm biến không dây n / w, điều khiển công nghiệp, thu thập dữ liệu y tế, xây dựng tự động hóa vv.

Mô-đun XBee
Giao diện của thiết bị XBee với PIC18F4550
Ở đây, chúng tôi đã kết nối các thiết bị sau với thiết bị XBee End
- Cảm biến nhiệt độ LM35 như mẫu tương tự
- Chuyển đổi thành mẫu kỹ thuật số
Bây giờ chúng tôi yêu cầu những mẫu tương tự và kỹ thuật số từ XBee End Device bằng cách sử dụng XBee Coordinator.
Bây giờ hãy lập trình PIC18F4550 để yêu cầu các mẫu Analog và Digital từ thiết bị đầu cuối XBee thông qua điều phối viên XBee. Cả XBee đều sử dụng chế độ vận hành API.
Chúng tôi đang hiển thị trạng thái của công tắc ở dạng kỹ thuật số (0 cho OFF và 1 cho ON), và nhiệt độ LM35 nhận được bởi thiết bị điều phối XBee trên màn hình LCD 16x2 kết nối với PIC18F4550.
Lưu ý rằng ADC Vref thay đổi theo Mô hình XBee. Tham khảo ADC Voltages để tìm Vref cho model của bạn.
Mô hình XBee chúng ta đang sử dụng dựa trên giao thức ZigBee và nó có Vref cố định là 1.2V.
Sơ đồ giao thoa
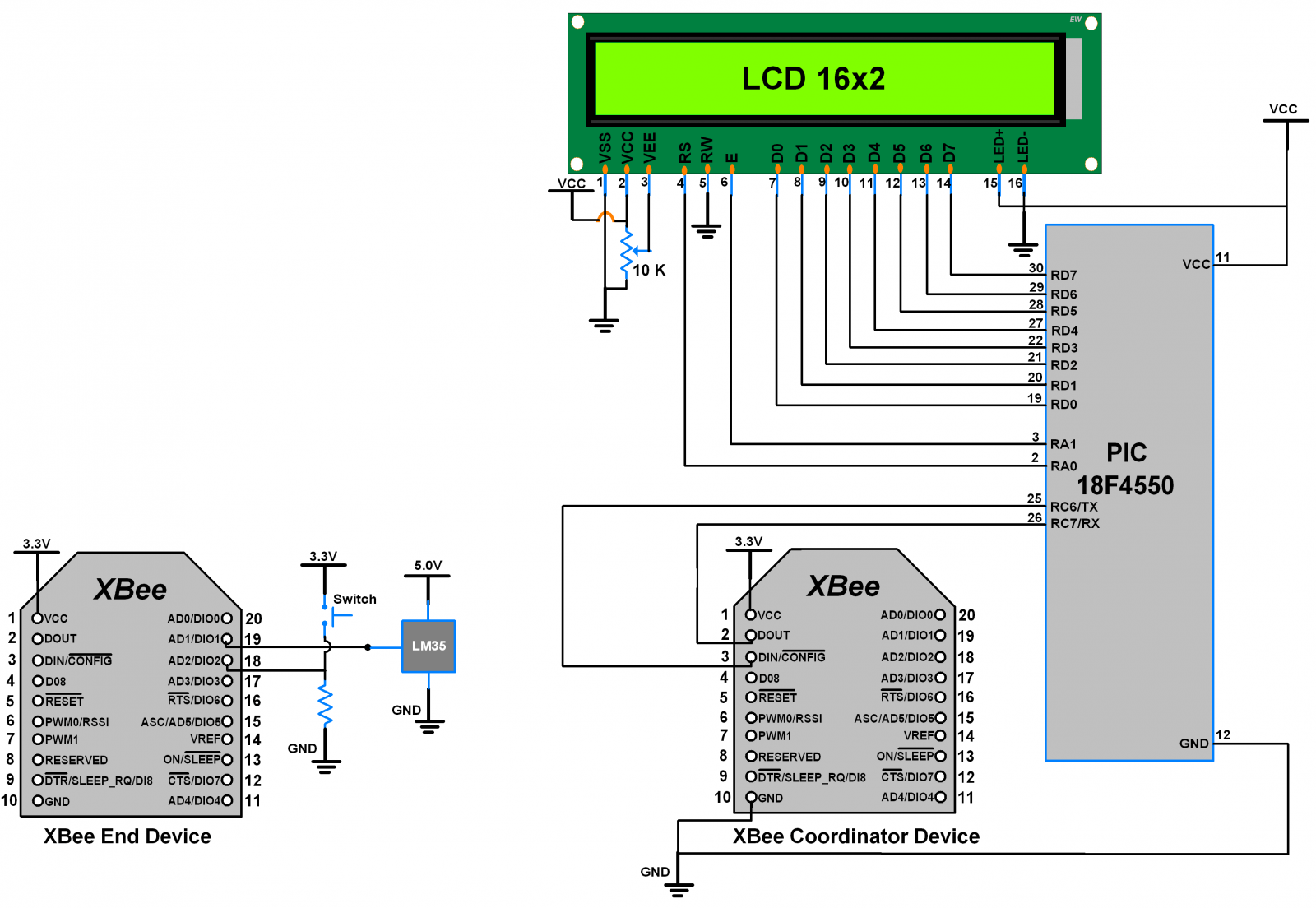
XBee interfacing với PIC18F4550
Lưu ý: Trong ví dụ trên, chúng ta cần cấu hình các chân XBee End Device (AD1 / DIO1 & AD2 / DIO2) làm đầu vào Analog và Digital.
Cần phải biết
Ở đây chúng tôi đang sử dụng XBee trong chế độ API để cho mục đích truyền thông cơ bản, chúng tôi đang xây dựng một số khung cơ bản như
- Ở khung lệnh: -
- Sử dụng khung này, chúng ta có thể gửi lệnh AT tới thiết bị XBee.
- REMOTE AT COMMAND FRAME: -
- Sử dụng khung này, chúng ta có thể gửi lệnh AT đến thiết bị XBee nằm ở vị trí từ xa với địa chỉ của chúng được chỉ định trong khung.
- CHUYỂN GIAO YÊU CẦU KHUNG: -
- Sử dụng khung này, chúng tôi có thể truyền chuỗi dữ liệu đến thiết bị XBee với địa chỉ của họ được chỉ định trong khung.
- KHUNG MẪU DỮ LIỆU IO: -
- Sử dụng khung này, chúng tôi nhận dữ liệu analog / kỹ thuật số được truyền bởi thiết bị XBee nằm ở vị trí từ xa với địa chỉ được chỉ định trong khung.
Trong chương trình dưới đây, chúng tôi đang sử dụng các hàm xây dựng cấu trúc khung đã đề cập ở trên. Chức năng cấu trúc khung API dài, nhưng dễ hiểu khi chúng tôi biết từng cấu trúc khung API.
Để làm quen với các khung API và cấu trúc của chúng, hãy tham khảo Trình tạo khung API trong phần X-CTU trong Mô-đun XBee .
Chương trình
/*
* PIC18F4550 interface with X-Bee
*/
#include <pic18f4550.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <stdint.h>
#include <stdbool.h>
#include "Configuration_header_file.h"
#include "LCD_16x2_Header_File.h" /* Include LCD header file */
#include "USART_Header_File.h" /* Include USART header file */
/* Define Required XBee Frame Type and Responses */
#define START_DELIMITER 0x7E
#define AT_COMMAND_FRAME 0x08
#define TRANSMIT_REQUEST_FRAME 0x10
#define REMOTE_AT_COMMAND_FRAME 0x17
#define IO_DATA_SAMPLE_FRAME 0x92
#define AT_COMMAND_RESPONSE_FRAME 0x88
#define REMOTE_AT_COMMAND_RESPONSE_FRAME 0x97
#define RECEIVE_PACKET_FRAME 0x90
#define TRANSMIT_STATUS_FRAME 0x8B
#define FRAME_ID 0x01
#define REMOTE_AT_COMMAND_OPT 0x02
#define TRANSMIT_REQUEST_OPT 0x00
#define TRANSMIT_REQUEST_BROADCAST_RADIUS 0x00
#define Read 0
#define Write 1
#define BUFFER_SIZE 100
#define DIGITAL_BUFFER_SIZE 16
#define ANALOG_BUFFER_SIZE 8
uint8_t ReceiveBuffer[BUFFER_SIZE];
int8_t DigitalData[DIGITAL_BUFFER_SIZE];
int16_t AnalogData[ANALOG_BUFFER_SIZE];
uint16_t BufferPointer = 0,
LastByteOfFrame = 0;
uint32_t Command_Value = 0;
bool _IsContainsDigital = false,
_IsContainsAnalog = false;
bool Is_Data_Received() /* Check wether data received or not */
{
for (uint8_t i = 0; i < BUFFER_SIZE; i++)
{
if (ReceiveBuffer[i] != 0 && i > 0)
return true;
}
return false;
}
bool Is_Checksum_Correct() /* Check wether received data is correct */
{
uint16_t checksum = 0;
for(uint8_t i = 3; i < LastByteOfFrame; i++)
checksum = checksum + ReceiveBuffer[i];
checksum = 0xFF - checksum;
if(ReceiveBuffer[LastByteOfFrame] == (uint8_t)checksum &&
LastByteOfFrame > 0)
return true;
else
return false;
}
/* Sample function for parsing received buffer as per frame type */
void sample()
{
uint8_t Frame_Type, Is_Analog;
uint16_t Length, Is_Digital, Digital_Value;
_IsContainsAnalog = false;
_IsContainsDigital = false;
/* 2 byte Frame length is at 1st and 2nd position of frame */
Length = ((int)ReceiveBuffer[1]<<8) + ReceiveBuffer[2];
/* 1 byte Frame type is at 3rd position of frame */
Frame_Type = ReceiveBuffer[3];
switch (Frame_Type)
{
case (IO_DATA_SAMPLE_FRAME): /* Parse received I/O data sample frame */
if(Is_Data_Received() == false || Is_Checksum_Correct() == false) break;
Is_Digital = ((int)ReceiveBuffer[16]<<8) + ReceiveBuffer[17];
Is_Analog = ReceiveBuffer[18];
Digital_Value = ((int)ReceiveBuffer[19]<<8) + ReceiveBuffer[20];
if(Is_Analog != 0)
_IsContainsAnalog = true;
if(Is_Digital != 0)
_IsContainsDigital = true;
/****** Check For whether sample contains Analog/Digital Sample *********/
for (uint8_t i = 0; i < DIGITAL_BUFFER_SIZE; i++)
{
if(((Is_Digital >> i) & 0x01) == 1 && ((Digital_Value>>i) & 0x01) != 0)
DigitalData[i] = 1;
else if(((Is_Digital >> i) & 0x01) == 1 && ((Digital_Value>>i) & 0x01) == 0)
DigitalData[i] = 0;
else
DigitalData[i] = -1;
}
for (uint8_t i = 0, j = 0; i < ANALOG_BUFFER_SIZE; i++)
{
if(((Is_Analog >> i) & 0x01) == 1)
{
if(Is_Digital != 0)
AnalogData[i] = 256 * ReceiveBuffer[21+(j*2)] + ReceiveBuffer[22+(j*2)];
else
AnalogData[i] = 256 * ReceiveBuffer[19+(j*2)] + ReceiveBuffer[20+(j*2)];
j++;
}
else
{
AnalogData[i] = -1;
}
}
case (TRANSMIT_STATUS_FRAME):/* Parse received Transmit status frame */
if(Is_Data_Received() ==false || Is_Checksum_Correct() ==false) break;
break; /* Check whether frame is correctly received or not */
case (RECEIVE_PACKET_FRAME):
if(Is_Data_Received() ==false || Is_Checksum_Correct() ==false) break;
break;
case (REMOTE_AT_COMMAND_RESPONSE_FRAME):
if(Is_Data_Received() ==false || Is_Checksum_Correct() ==false) break;
break;
case (AT_COMMAND_RESPONSE_FRAME):
if(Is_Data_Received() ==false || Is_Checksum_Correct() ==false) break;
break;
default:
break;
}
}
bool Get_Sample() /* Get sample function */
{
MSdelay(200); /* Wait for response */
for (uint16_t count = 0; Is_Data_Received() == false; count++)
{
if(count>15000)
{
return false;
}
}
INTCONbits.GIE=0; /* Disable global interrupt to parse received data */
sample(); /* Parse data in sample function */
memset(ReceiveBuffer,0,BUFFER_SIZE);/* Clear ReceiveBuffer */
INTCONbits.GIE=1; /* Enable Global Interrupt */
return true; /* Return success value */
}
Remote_AT_Command(uint32_t Long_Address_MSB, uint32_t Long_Address_LSB,
uint16_t Short_Address, const char* ATCommand, bool action)
{
uint16_t Length,Checksum;
if (action == Write)
{
/* Define parameter value depend frame length */
if(Command_Value > 0x00FFFFFF) Length = 19;
else if(Command_Value > 0x00FFFF) Length = 18;
else if(Command_Value > 0x00FF) Length = 17;
else Length = 16;
}
else
Length = 15;
Checksum = REMOTE_AT_COMMAND_FRAME + FRAME_ID;/* Calculate Checksum */
for (int8_t i = 24; i >= 0; i = i-8)
Checksum = Checksum + (Long_Address_MSB >> i);
for (int8_t i = 24 ; i >= 0; i = i-8)
Checksum = Checksum + (Long_Address_LSB >> i);
Checksum = Checksum + (Short_Address >> 8) + Short_Address
+ REMOTE_AT_COMMAND_OPT + ATCommand[0] + ATCommand[1];
if (action == Write)
Checksum = Checksum + (Command_Value >> 24) + (Command_Value >> 16)
+ (Command_Value >> 8) + Command_Value ;
/* Subtract checksum lower byte from 0xFF to get 1 byte checksum */
Checksum = 0xFF - Checksum;
USART_TxChar(START_DELIMITER); /* Send frame start with 1 byte Delimiter */
USART_TxChar(Length >> 8); /* Send 2 byte length */
USART_TxChar(Length);
USART_TxChar(REMOTE_AT_COMMAND_FRAME); /* Send 1 byte frame type */
USART_TxChar(FRAME_ID); /* Send 1 byte frame ID */
for (int8_t i = 24 ; i >= 0 ; i = i-8) /* Send 32-bit long destin address MSB */
USART_TxChar(Long_Address_MSB >> i);
for (int8_t i = 24 ; i >= 0 ; i = i-8) /* Send 32-bit long destin address LSB */
USART_TxChar(Long_Address_LSB >> i);
USART_TxChar(Short_Address >> 8); /* Send 16-bit long destination address */
USART_TxChar(Short_Address);
USART_TxChar(REMOTE_AT_COMMAND_OPT); /* Send Option */
USART_SendString(ATCommand); /* Send AT command */
if(action == Write)
{
if(Length == 19) /* Send value */
{
USART_TxChar(Command_Value >> 24);
USART_TxChar(Command_Value >> 16);
USART_TxChar(Command_Value >> 8);
}
if(Length == 18)
{
USART_TxChar(Command_Value >> 16);
USART_TxChar(Command_Value >> 8);
}
if(Length == 17)
USART_TxChar(Command_Value >> 8);
USART_TxChar(Command_Value);
}
USART_TxChar(Checksum); /* Send Checksum */
}
void AT_Command(const char* ATCommand, bool action)
{
uint16_t Length,Checksum;
if (action == Write)
{
if(Command_Value > 0x00FFFFFF) Length = 8;
else if(Command_Value > 0x00FFFF) Length = 7;
else if(Command_Value > 0x00FF) Length = 6;
else Length = 5;
}
else
Length = 4;
Checksum = AT_COMMAND_FRAME + FRAME_ID + ATCommand[0] + ATCommand[1];
if (action == Write)
Checksum = Checksum + (Command_Value >> 24) + (Command_Value >> 16)
+ (Command_Value >> 8) + Command_Value ;
Checksum = 0xFF - Checksum;
USART_TxChar(START_DELIMITER);
USART_TxChar(Length >> 8);
USART_TxChar(Length);
USART_TxChar(AT_COMMAND_FRAME);
USART_TxChar(FRAME_ID);
USART_SendString(ATCommand);
if(action == Write)
{
if(Length == 8) /* Send value */
{
USART_TxChar(Command_Value >> 24);
USART_TxChar(Command_Value >> 16);
USART_TxChar(Command_Value >> 8);
}
if(Length == 7)
{
USART_TxChar(Command_Value >> 16);
USART_TxChar(Command_Value >> 8);
}
if(Length == 6)
USART_TxChar(Command_Value >> 8);
USART_TxChar(Command_Value);
}
USART_TxChar(Checksum);
}
void Transmit_Request(uint32_t Long_Address_MSB, uint32_t Long_Address_LSB,
uint16_t Short_Address, char* str)
{
uint16_t Length,Checksum;
Length = 14 + strlen(str);
Checksum = TRANSMIT_REQUEST_FRAME + FRAME_ID;/* Calculate Checksum */
for (int8_t i = 24; i >= 0; i = i-8)
Checksum = Checksum + (Long_Address_MSB >> i);
for (int8_t i = 24 ; i >= 0; i = i-8)
Checksum = Checksum + (Long_Address_LSB >> i);
Checksum = Checksum + (Short_Address >> 8) + Short_Address;
for (int8_t i=0;str[i]!=0;i++)
Checksum = Checksum + str[i];
Checksum = 0xFF - Checksum;
USART_TxChar(START_DELIMITER);
USART_TxChar(Length >> 8);
USART_TxChar(Length);
USART_TxChar(TRANSMIT_REQUEST_FRAME);
USART_TxChar(FRAME_ID);
for (int8_t i = 24 ; i >= 0 ; i = i-8)
USART_TxChar(Long_Address_MSB >> i);
for (int8_t i = 24 ; i >= 0 ; i = i-8)
USART_TxChar(Long_Address_LSB >> i);
USART_TxChar(Short_Address >> 8);
USART_TxChar(Short_Address);
USART_TxChar(TRANSMIT_REQUEST_BROADCAST_RADIUS);
USART_TxChar(TRANSMIT_REQUEST_OPT);
USART_SendString(str);
USART_TxChar(Checksum);
}
void Write_AT_Command(char* ATCommand, uint32_t _CommandValue)
{
Command_Value = _CommandValue;
AT_Command(ATCommand, Write);
}
void Read_AT_Command(char* ATCommand)
{
AT_Command(ATCommand, Read);
}
void Write_Remote_AT_Command(uint32_t Long_Address_MSB, uint32_t Long_Address_LSB,
uint16_t Short_Address, char* ATCommand, uint32_t _CommandValue)
{
Command_Value = _CommandValue;
Remote_AT_Command(Long_Address_MSB, Long_Address_LSB, Short_Address, ATCommand, Write);
}
void Read_Remote_AT_Command(uint32_t Long_Address_MSB, uint32_t Long_Address_LSB,
uint16_t Short_Address, char* ATCommand, uint32_t _CommandValue)
{
Remote_AT_Command(Long_Address_MSB, Long_Address_LSB, Short_Address, ATCommand, Read);
}
void interrupt ISR() /* Receive ISR routine */
{
char received_char;
if(RCIF==1){
received_char = RCREG;
/* check if any overrun occur due to continuous reception */
if(RCSTAbits.OERR)
{
CREN = 0;
NOP();
CREN=1;
}
if (received_char == START_DELIMITER)
{
LastByteOfFrame = BufferPointer;
BufferPointer = 0;
ReceiveBuffer[BufferPointer] = received_char;
}
else
{
BufferPointer++;
ReceiveBuffer[BufferPointer] = received_char;
}
}
}
void SetTo_Broadcast()
{
MSdelay(500);
Write_AT_Command("DH", 0x00000000);
MSdelay(500);
Write_AT_Command("DL", 0x0000FFFF);
MSdelay(500);
Read_AT_Command("WR");
MSdelay(1000);
}
int main(void)
{
char _buffer[25];
double Temperature;
uint32_t Remote_Address_DH = 0x0013A200;
uint32_t Remote_Address_DL = 0x41241CB2;
OSCCON=0x72; /* set internal clock to 8MHz */
USART_Init(9600); /* Initiate USART with 9600 baud rate */
LCD_Init(); /* Initialize LCD */
LCD_String_xy(1, 0, "X-Bee Network ");
LCD_String_xy(2, 0, "Demo..!!");
MSdelay(20000);
LCD_Clear();
INTCONbits.GIE=1; /* enable Global Interrupt */
INTCONbits.PEIE=1; /* enable Peripheral Interrupt */
PIE1bits.RCIE=1; /* enable Receive Interrupt */
LCD_String_xy(1, 0, "Setting X-Bee to");
LCD_String_xy(2, 0, "Broadcast mode ");
SetTo_Broadcast(); /* Set XBee coordinator to broadcast mode */
LCD_Clear();
LCD_String_xy(1, 0, "Request Samples ");
/* Request Samples from remote X-Bee device at 100ms Sample rate */
Write_Remote_AT_Command(Remote_Address_DH, Remote_Address_DL, 0xFFFE, "IR", 100);
MSdelay(1500);
LCD_Clear();
while (1)
{
Get_Sample();
if (_IsContainsDigital)
{
if(DigitalData[2] >= 0)/* Switch status on DIO2 pin */
{
sprintf(_buffer, "Switch = %d ", DigitalData[2]);
LCD_String_xy(1, 0, _buffer); /* print on 1st row */
memset(_buffer, 0, 25); /* Clear Buffer */
}
}
if (_IsContainsAnalog)
{
Temperature = (double)AnalogData[1] * 0.1171875;
if(AnalogData[1] >= 0)/* LM35 value on AIN1 pin */
{
sprintf(_buffer, "Temp = %0.1f C ", Temperature);
LCD_String_xy(2, 0, _buffer);/* print on 2nd row */
memset(_buffer, 0, 25); /* Clear Buffer */
}
}
}
Không có nhận xét nào:
Đăng nhận xét